O que é Onda?
Em física, uma onda é uma perturbação oscilante de alguma grandeza física no espaço e periódica no tempo. A oscilação espacial é caracterizada pelo comprimento de onda e a periodicidade no tempo é medida pela frequência da onda, que é o inverso do seu período. Estas duas grandezas estão relacionadas pela velocidade de propagação da onda.
Fisicamente, uma onda é um pulso energético que se propaga através do espaço ou através de um meio (líquido, sólido ou gasoso). Segundo alguns estudiosos e até agora observado, nada impede que uma onda magnética se propague no vácuo ou através da matéria, como é o caso das ondas eletromagnéticas no vácuo ou dos neutrinos através da matéria, onde as partículas do meio oscilam à volta de um ponto médio, mas não se deslocam. Exceto pela radiação eletromagnética, e provavelmente as ondas gravitacionais, que podem se propagar através do vácuo, as ondas existem em um meio cuja deformação é capaz de produzir forças de restauração através das quais elas viajam e podem transferir energia de um lugar para outro sem que qualquer das partículas do meio seja deslocada; isto é, a onda não transporta matéria. Há, entretanto, oscilações sempre associadas ao meio de propagação.Uma onda pode ser longitudinal quando a oscilação ocorre na direção da propagação, ou transversal quando a oscilação ocorre na direção perpendicular à direção de propagação da onda.
- Tipos de Ondas e suas Formas
Na Física, comumente ouvimos falar de ondas, mais popularmente, ouvimos falar das ondas sonoras. O que não sabemos é que diferente das ondas do mar, na física, onda é um conjunto de oscilações que não transportam matéria e sim energia, ou seja, dada certa oscilação ao passo que ela se repete, formamos uma onda, que transporta somente energia e não matéria. As ondas podem ser classificadas quanto a sua natureza, quanto a sua forma e quanto a direção de propagação.
Quanto à natureza, existem dois tipos de ondas. Mecânica ou Eletromagnética:
- Onda Mecânica é aquela que só poderá se propagar em meios materiais, ou seja, na água, no ar, em um fio, tudo o que é material. Exemplo: Som;
- Onda Eletromagnética é aquela que se propaga em meios materiais ou não, como o vácuo (não material) ou a água (material). Exemplo: Luz Solar.
Quanto à forma de uma onda, podemos classificá-la em longitudinal e transversal:
- Onda Longitudinal é aquela que se propaga na mesma direção à do movimento. Exemplo: A vibração de uma mola, que ocorre na mesma direção do seu movimento;
- Onda Transversal é aquela que tem sua propagação perpendicular ao movimento. Exemplo: Ondas em lago causadas por uma pessoa, onde a perturbação é causada na vertical, porém o movimento da onda é na horizontal.
Ainda sobre a classificação das ondas podemos dizer quanto à direção da propagação que podem ser: Unidimensional, Bidimensional ou Tridimensional:
- Unidimensional é aquela que tem seu movimento numa única direção. Exemplo: Mola;
- Bidimensional é aquela que tem como rumo um único plano. Exemplo: Ondas em um lago;
- Tridimensional é aquela que se propaga em todas as direções espaciais. Exemplo: Ondas Sonoras.
As ondas estão presentes no nosso cotidiano, mesmo nas coisas simples como quando jogamos uma pedra no lago, são formadas pequenas ondas na superfície da água.
Quando assistimos Televisão ou ouvimos Rádio, as imagens e sons são transmitidos por Ondas Eletromagnéticas e captadas pelas antenas. Quando tocamos violão, flauta, conversamos ou cantamos, os sons são transmitidos por ondas e captados por nossos ouvidos, ou até mesmo em um estádio de futebol, quando fazemos uma “OLA” estamos fazendo uma “Onda Humana”.
O que é Acústica?
A Acústica é o ramo da física que estuda o som. O som é um fenômeno ondulatório causado pelos mais diversos objetos e se propaga através dos diferentes estados físicos da matéria.
Em acústica geralmente podemos dividir entre geradores de som, meios de transmissão, propagação e receptores. A acústica mensura estes meios cria instrumentos, tabelas, etc., de forma a fornecer dados necessários aos mais diversos ramos da ciência para a utilização dos sons, de seus meios de propagação e efeitos.
Na cadeia geração e recepção acústica inclui-se o indivíduo que recebe o efeito sonoro e o evento que dá origem ao fenômeno. A acústica é considerada uma ciência que abrange diversas disciplinas e por elas é abrangida.
Ondas sonoras são as que possuem frequência de vibração entre 20 e 20.000Hz, que naturalmente, são captadas e processadas por nosso sistema auditivo. Que se origina a partir de vibrações do ar que são captadas pelo tímpano com frequências e amplitudes pré-definidas.
- Intensidade sonora
Se observarmos a propagação de uma onda do ponto de vista geométrico apenas teremos o meio em forma de onda, já ao observa-la do ponto de vista físico teremos que uma onda é basicamente a propagação de energia.
A intensidade I de uma onda é definida como a média no tempo da quantidade de energia que é transportada pela onda, por unidade de área ao logo do tempo.
Assim:
Onde P é a amplitude de pressão;

É a densidade média do ar;

É a velocidade da onda sonora.
Deve-se notar que a intensidade é proporcional ao quadrado da amplitude.
Qualidades Fisiológicas do Som
As qualidades fisiológicas são as três qualidades diversas que o ouvido humano normal é capaz de distinguir no som. Essas qualidades são:
- Altura ou tom:
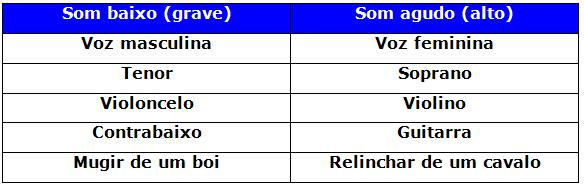
A altura é considerada a qualidade que faz com que o ouvido possa distinguir um som baixo (grave) de um som alto (agudo).
Som baixo (grave) - baixa frequência.
Som alto (agudo) - alta frequência.
Comparando sons pelas suas alturas (frequências médias):
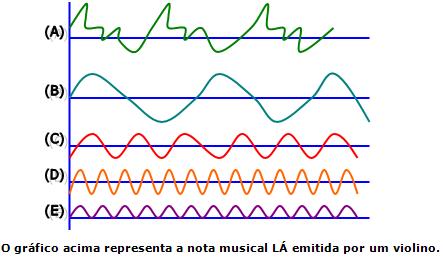
- Timbre:
O timbre é considerado a qualidade que faz com que o som seja distinguido na mesma intensidade e na mesma altura, mesmo sendo emitidos por fontes diferentes.
Os harmônicos, ou seja, as frequências múltiplas são os responsáveis pelo timbre, pois eles acompanham cada som, por exemplo, se um violino ou um piano emitir a mesma nota musical com intensidades iguais poderá distinguir os dois sons, porém cada um apresentará o seu timbre.
Este fato ocorre pelo fato dos harmônicos acompanharem o som de cada instrumento variando assim em intensidade e quantidade.
Isso da para cada instrumento uma forma de onda diferente. Portanto podemos dizer que o timbre de um som está relacionado à respectiva forma de onda.
- Intensidade auditiva (ou sonoridade):
Esta intensidade é considerada a qualidade que faz com que o ouvido possa distinguir um som forte de um som fraco.
Som fraco - baixa força.
Som forte - alta força.
Lei de Weber-Fechner – decibel
S 0 = sonoridade referência.
S = sonoridade do som considerado.
I0 = intensidade de referência.
I = intensidade do som considerado.
“A magnitude da sensação auditiva, ou seja, o nível do som é função do 1º grau do logaritmo do agente excitador”.
(Lei de Weber-Fechner)
O valor mais comum da constante K é 10. Portanto podemos perceber que neste caso a magnitude da sensação auditiva é dada em decibel (dB), vejamos:
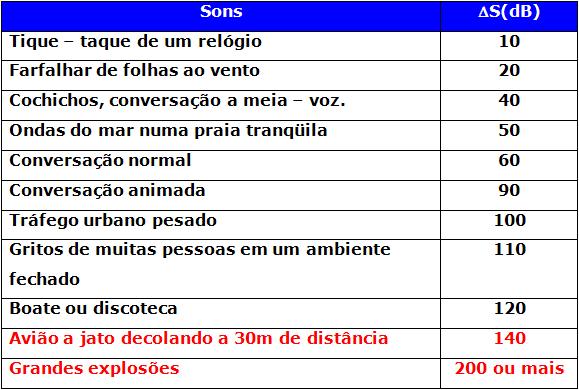
Vejamos uma tabela a seguir onde está representada a magnitude da sensação auditiva para certos sons. Os valores pressupõem: S0 = 0 e I0 = 10-16 W/cm2
O que é Decibel?
O decibel (dB) é uma medida da razão entre duas quantidades, sendo usado para uma grande variedade de medições em acústica, física e eletrônica. O decibel é muito usado na medida da intensidade de sons. É uma unidade de medida adimensional, semelhante à percentagem. A definição do dB é obtida com o uso do logaritmo.
Uma intensidade sonora I ou potência P pode ser expressa em decibel através da equação
onde I0 e P0 são as intensidades e potências de referência.
Se PdB é 3 dB então P é o dobro de P0.
Se PdB é 10 dB então P é 10 vezes maior que P0.
Se PdB é -10 dB então P é 10 vezes menor que P0.
Se PdB é 20 dB então P é 100 vezes maior que P0.
Se PdB é -20 dB então P é 100 vezes menor que P0.
A tensão elétrica (V) corrente elétrica (I) ou pressão (p) podem ser expressas em decibel através das equações.
Onde X pode ser a tensão V, corrente I ou pressão p, e X0 são seus valores de referência. Note que é incorreto utilizar essas medidas se as impedâncias elétricas ou acústicas não são as mesmas nos pontos onde a tensão ou pressão é comparada. Usando essa abordagem o decibel é uma medida de intensidade ou potência relativa.
Se VdB é 6 dB então V é o dobro que V0.
Se VdB é 20 dB então V é 10 vezes maior que V0.
Se VdB é -20 dB então V é 10 vezes menor que V0.
Se VdB é 40 dB então V é 100 vezes maior que V0.
Se VdB é -40 dB então V é 100 vezes menor que V0.
Embora o Comitê Internacional de Pesos e Medidas (BIPM) aceite a sua utilização com o sistema SI, ele não é uma unidade do SI. Apesar disso, seguem-se as convenções do SI, e a letra d é grafada em minúscula por corresponder ao prefixo deci- do SI, e B é grafado em maiúsculo pois é uma abreviatura (e não abreviação) da unidade bel que é derivada de nome Alexander Graham Bell. Como o bel é uma medida muito grande para uso diário, o decibel (dB), que corresponde a um décimo de bel (B), acabou se tornando a medida de uso mais comum.t
Bibliografía:
















{kind=link}